


Correction of Offshore Forecast Wind Speed Based on Floating LiDAR Observation Data
-
摘要: 本文阐述了海上漂浮式测风设备对数据的测量方式和校准方法后,利用三部漂浮式测风激光雷达50、80和100m三个高度的风速数据,对同地点和高度的GFS全球天气预报模式的风速数据进行预报订正。结果表明,直接采用滑动自适应权重的Kalman滤波方法产生累积的滞后平均偏差对风速进行订正的结果并不理想,统计发现通过降低预报订正公式中的滞后平均偏差项的比值,可以获得更好的标准偏差结果。滞后平均偏差比值减小至0.1~0.5后经Kalman滤波方法订正后的风速标准偏差整体要低于订正前的风速标准偏差,其中最佳的比值为0.3。利用这一滞后偏差比值对三部雷达不同预报时刻和预报时效的风速样本组进行订正后发现,除了个别数据样本组外,超过90%数据样本组的风速标准偏差较订正前是减小的。经改进的算法订正后各高度层风速预报值的改善率大致在5~20%范围内。Abstract: This study focused on correcting short-term wind speed forecasts extracted from GFS global forecast data sets at corresponding locations and heights. Data measurement mode and calibration method of the LiDAR data were discussed, and wind speed at three different heights (50m, 80m, and 100m) from floating LiDARs were employed. The results indicated that directly using the Kalman filter method with sliding adaptive weights to generate the average hysteresis deviation to correct the wind speed did not yield satisfactory results. Statistical analysis suggested that better standard deviation results can be obtained by lowering the ratio of the average hysteresis deviation in the forecast correction formula. When the average hysteresis deviation ratio was reduced to 0.1—0.5, the wind speed standard deviation after correction by the Kalman filtering method was generally lower than the wind speed standard deviation before correction, and the best ratio was 0.3. Using this hysteresis deviation ratio for wind speed correction at different forecast times and periods for these three LiDAR devices revealed that, except for individual data sets, more than 90% of the wind speed data sets exhibited reduced standard deviation after correction compared to the uncorrected data sets. After the introduction of this improved algorithm, the wind speed forecast improvement rate at each height ranged from 5% to 20%.
-

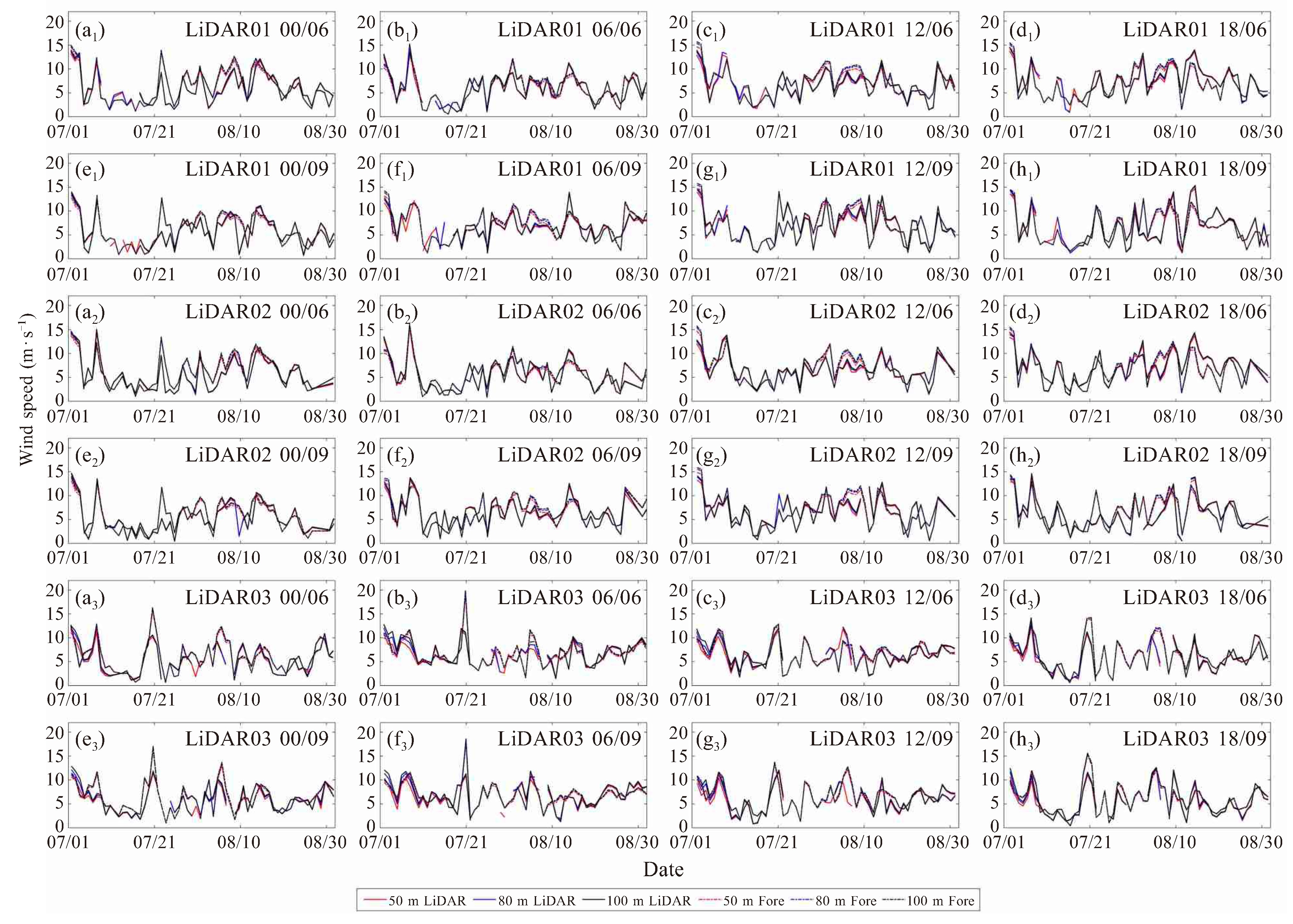
图 5 50 m、80 m和100 m三个高度上的观测和预报风速时序图
不同颜色的实线和虚线分别表示测风激光雷达实测风速值和GFS预报风速值,横坐标为日期,纵坐标为风速值,单位:m·s-1。

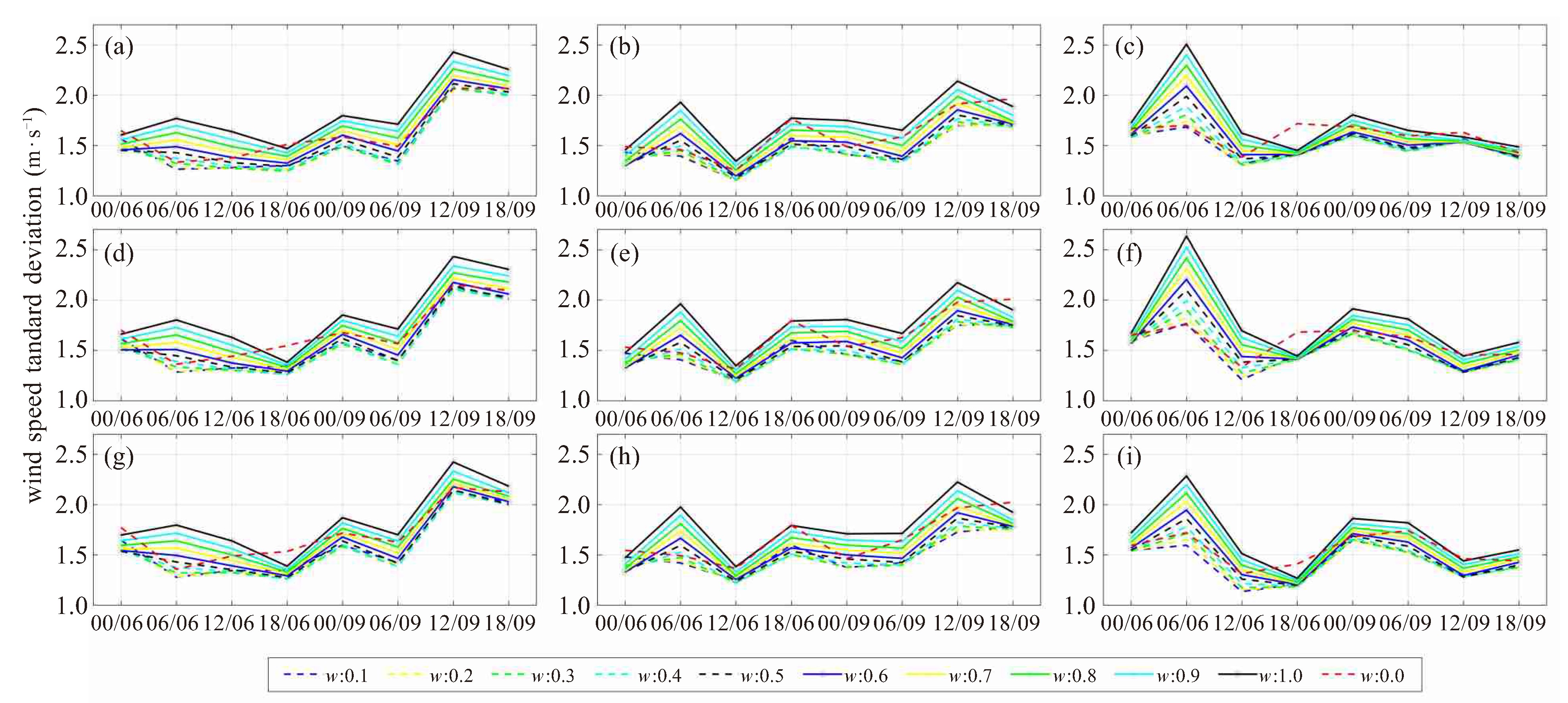
图 6 采用不同的滞后平均偏差比值计算后得到的不同高度的风速预报标准偏差值
横坐标表示不同预报时刻/预报时效,纵坐标表示风速标准偏差值,单位:m·s-1。不同颜色和线型表示不同修正比值计算得到的风速平均标准偏差。
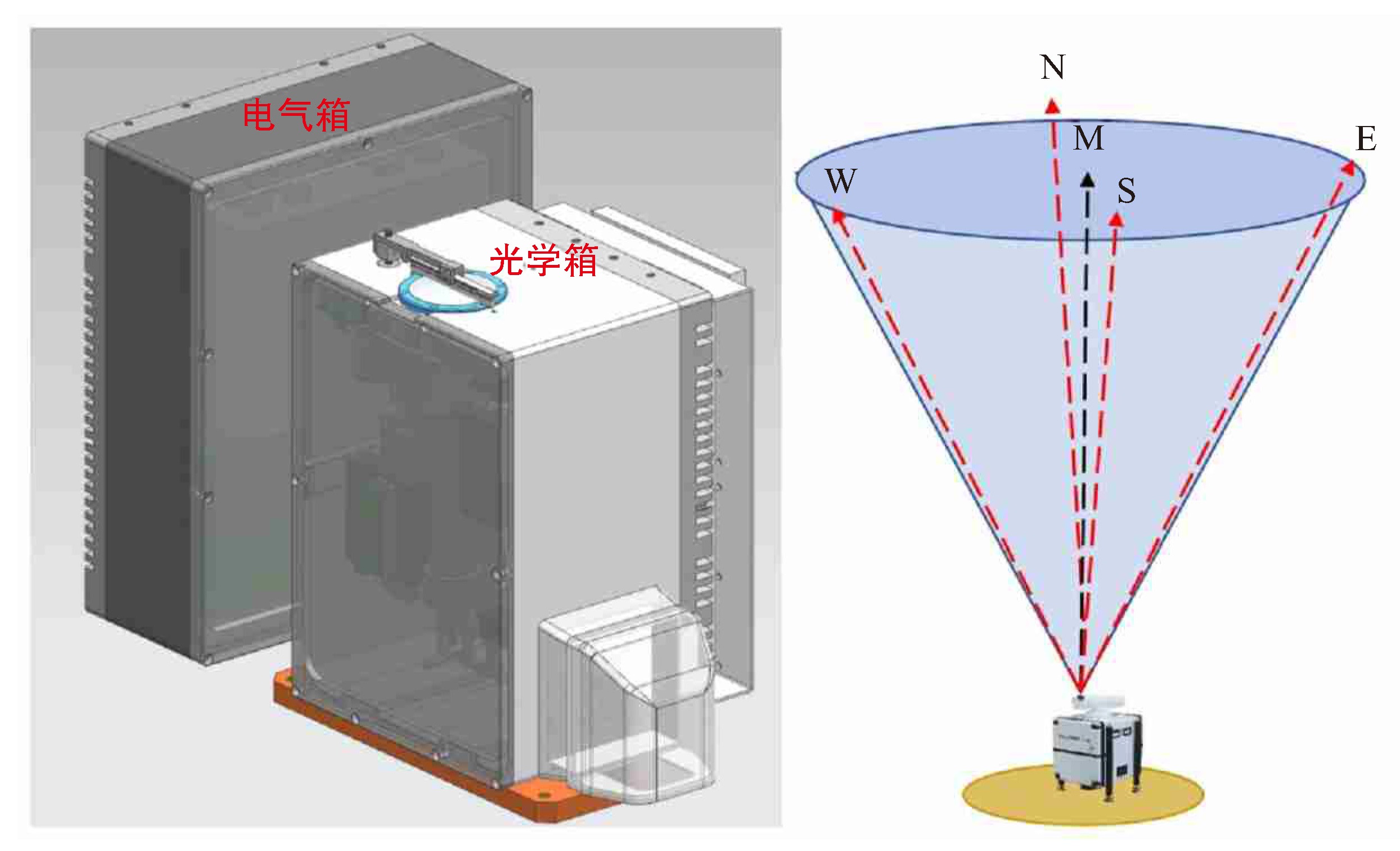
表 1 浮标主体参数
主体参数 性能指标 主体参数 性能指标 排水量 ≥50.4 t 抗风能力 ≥13级 最大直径 10.4 m 抗最大波高 ≥18 m 浮标直径 10.4 m 抗最大波高 ≥18 m 浮标型深 2.2 m 表层流速 0~3.5 m·s-1 设计吃水 0.95 m 冲击 峰值加速度≤300 m·s-2 仪器舱直径 6.3 m 倾斜 ≤30 ° 平底直径 6.5 m 最大横摇角 ±25 °之内 舭部升高 1.0 m 锚泊方式 DIN5683-Ⅱ系泊链 桅杆直径 下部1.5 m, 上部0.8 m 布放水深范围 20~200 m 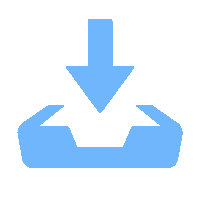 下载: 导出CSV
下载: 导出CSV
表 2 测风激光雷达主要指标参数
指标项 WindPrint V300分体式 备注 激光波长 1 550 nm 人眼安全不可见 脉冲宽度 100~400 ns 可按需定制 单脉冲能量 ≥10 µJ 径向数据更新速率 1~4 Hz 可软件设置 风速测量范围 0~75 m·s-1 风速测量精度 <0.1 m·s-1 风向测量范围 0~360 ° 风向测量精度 <2.5 ° 探测距离 40~300 m 距离分辨率(径向) 最小1 m,同时测24层 相对湿度 0~100% ±5%,10 min采样 气温 -40~70 ℃ ±0.3 ℃,10 min采样 气压 500~1 100 hPa ±1 hPa,10 min采样 重量 28.5 kg 电气箱14 kg,光学箱14.5 kg 平均功耗 常温下≤40 W,制冷风扇启动时≤50 W 视外部温度环境浮动 工作温度 -40~60 ℃ 工作湿度 相对湿度:0~100% 海上防护等级 IP68 激光人眼安全等级 Class 1M
下载: 导出CSV
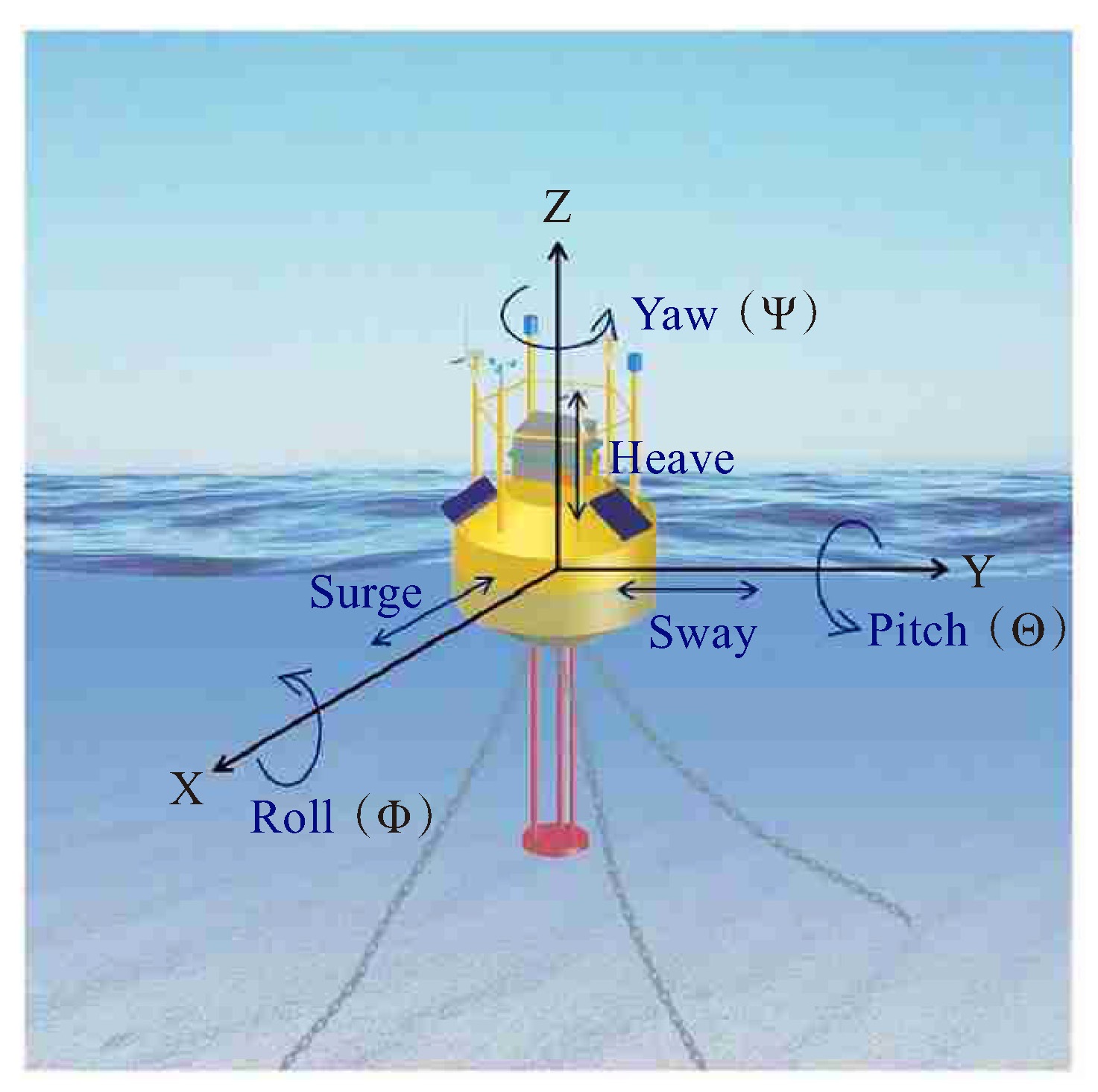
表 3 不同预报时间和预报时效样本组的最优偏差订正比值统计
预报时刻/预报时效 00/06 06/06 12/06 18/06 00/09 06/09 12/09 18/09 LiDAR01 0.5 0.3 0.3 0.4 0.3 0.3 0.2 0.3 LiDAR02 0.6 0.1 0.4 0.4 0.2 0.3 0.1 0.5 LiDAR03 0.3 0.1 0.3 0.2 0.1 0.4 0.6 0.2
下载: 导出CSV
表 4 原始的和经不同订正方法计算后的风速标准偏差比对
预报时刻/预报时效 00/06 06/06 12/06 18/06 00/09 06/09 12/09 18/09 50 m 1.60/1.59/1.47 1.50/2.07/1.53 1.34/1.55/1.25 1.67/1.56/1.38 1.59/1.78/1.50 1.56/1.67/1.36 1.87/2.05/1.78 1.82/1.88/1.69 80 m 1.63/1.60/1.50 1.53/2.13/1.57 1.36/1.56/1.25 1.68/1.54/1.40 1.64/1.86/1.56 1.61/1.73/1.41 1.86/2.02/1.73 1.86/1.93/1.71 100 m 1.64/1.63/1.5 1.52/2.02/1.5 1.39/1.51/1.24 1.58/1.48/1.32 1.62/1.81/1.54 1.67/1.74/1.44 1.87/2.03/1.73 1.86/1.89/1.71 注:表格中斜杠前后的数据分别表示:未经订正的原始风速标准偏差/由自适应权重Kalman滤波订正后标准偏差/经滞后平均偏差修正比值订正后的标准偏差。
下载: 导出CSV
-
[1] 李艳, 成培培, 路屹雄, 等. 典型复杂地形风能预报的精细化研究[J]. 高原气象, 2015, 34(2): 413-425. [2] 李福东, 曾旭华, 魏梅芳, 等. 基于聚类分析和混合自适应进化算法的短期风电功率预测[J]. 电力系统保护与控制, 2020, 48(22): 151-158. [3] 何健伟, 曹渝昆. LSTM-RF的中长期风电功率组合预测方法[J]. 上海电力大学学报, 2020, 36(4): 341-350. [4] 张人禾, 沈学顺. 中国国家级新一代业务数值预报系统GRAPES的发展[J]. 科学通报, 2008, 53(20): 2 393-2 395. [5] 钟剑, 黄思训, 费建芳, 等. 模式误差动力特征: 模式参数误差和物理过程描绘缺失误差[J]. 大气科学, 2011, 35(6) : 1 169-1 176. [6] 赵攀, 戴义平, 夏俊荣, 等. Kalman滤波修正的风电场短期功率预测模型[J]. 西安交通大学学报, 2011, 45(5): 47-51. [7] 徐晶晶, 胡非, 肖子牛, 等. 风能模式预报的相似误差订正[J]. 应用气象学报, 2013, 24(6): 731-740. [8] ROZAS-LARRAONDO P, INZA I, LOZANO J A, et al. A Method for wind speed forecasting in airports based on nonparametric regression [J]. Wea forecasting, 2014(29): 1 332-1 341. [9] 荣艳敏, 阎丽凤, 盛春岩, 等. 山东精细化海区风的MOS预报方法研究[J]. 海洋预报, 2015, 32(3): 59-67. . [10] MONAHAN, A H. The Gaussian Statistical Predictability of Wind Speeds[J]. J Climate, 2013, 26(15): 5 563-5 577. [11] 刘成思, 薛纪善. 关于集合Kalman滤波的理论和方法的发展[J]. 热带气象学报, 2005, 21(6): 628-633. [12] 魏文秀, 杨海龙. Kalman滤波技术在暴雨中期预报中的应用[J]. 气象, 1998, 24(3): 46-49. [13] 马清, 龚建东, 李莉, 等. 超级集合预报的误差订正与集成研究[J]. 气象, 2008, 34(3): 42-48. [14] 李正泉, 宋丽莉, 马浩, 等. 海上风能资源观测与评估研究进展[J]. 地球科学进展, 2016, 31(8): 800-810. [15] 王强, 王通, 路继宁. Fraunhofer漂浮式雷达与固定式测风塔测试阶段结果对比[J]. 海岸工程, 2020, 39(2): 130-141. [16] 薛洋洋, 陈好楠, 窦培林. 海上激光雷达测风浮标系统解决方案及关键技术分析[J]. 中外船舶科技, 2016(2): 15-21. [17] AXYS Technologies Inc. Wind sentinel-Race-Rocks-trial report[EB / OL]. AXYS Technologies, Sydney, BC, 2010. http://www.axystechnologies.com/wp-content/uploads/2010/3/Windsentinel-Race-Rocks-trial-report [18] FUGRO International Group. SEAWATCH Wind LiDAR Buoy[EB/OL]. Fugro OCEANOR AS, Sandnes, Norwa, 2013. http://www.oceanor.com/seawatch/buoys-and-sensor/SW_Wind_LiDAR [19] FRAUNHOFER Iwes. Offshore wind resource assessment with Fraunhofer IWES wind LiDAR buoy[EB / OL]. Fraunhofer WES, Brerhaven, germany, 2013. http://www.windenergie.iwes.fraunhfer.de/content/dam/windenergie/en/document/Factsheets_english/Datenblatt_boje_engl_web [20] HASAGER C B, STEIN D, COURTNEY M, et al. Hub height ocean winds over the North Sea observed by the NORSE WIND LiDAR array: measuring techniques, quality control and data management[J]. Remote Sensing, 2013, 5(9): 4 280-4 303. [21] 王浩, 易侃, 杜梦蛟, 等. 漂浮式激光雷达海上测风可靠性及影响因素研究[J]. 海洋预报, 2022, 39(5): 70-83. [22] 冷鹏, 禹智斌, 李肖雅, 等. 台风"黑格比"过境期间漂浮式激光雷达数据验证分析[J]. 风能, 2021(2): 7. [23] GOTTSCHALL J, WOLKEN-MOHLMANN G, VIERGUTZ T, et al, Results and conclusions of a floating-LiDAR offshore test[J]. Energy Procedia, 2014, 53: 156-161. [24] WOLKEN-MOHLMANN G, LILOV H, LANGE B. Simulation of motion induced measurement errors for wind measurements using LIDAR on floating platforms[C]. Paris: iSARS, 2010. [25] HOWE G. A floating LiDAR roadmap: Implications for offshore wind[J]. North American Clean Energy, 2014, 8(2). : 12-13. [26] KALMAN R E., A New Approach to Linear Filtering and Prediction Problems[J]. Journal of Basic Engineering, 1960, 82(1): 35-45. [27] 佟华, 郭品文, 朱跃建, 等. 基于大尺度模式产品的误差订正与统计降尺度气象要素预报技术[J]. 气象, 2014, 40(1): 68-77. [28] CUI B, TOTH Z, ZHU Y, et al. Bias Correction for Global Ensemble Forecast[J]. Wea Forecasting, 2011, 27(2): 396-410. [29] 任宏利, 丑纪范, 统计-动力相结合的相似误差订正法[J]. 气象学报, 2005, 63(6): 988-993. [30] 马清, 糞建东, 李莉, 等. 超级集合预报的误差订正与集成研究[J]. 气象, 2008, 34(3): 42-48. [31] 刘成思, 薛纪善. 关于集合Kalman滤波的理论和方法的发展[J]. 热带气象学报, 2005, 21(6): 628-633. -

 点击查看大图
点击查看大图
图(7) / 表(4)
计量
- 文章访问数: 57
- HTML全文浏览量: 25
- PDF下载量: 7
- 被引次数: 0
 粤公网安备 4401069904700003号
粤公网安备 4401069904700003号